Cooperative outdoor flight: Theory, System development and Integration
In this project we have developed and implemented a holistic system architecture capable of handling control and communication of a multi-agent system. 

In this project we have developed and implemented a holistic system architecture capable of handling control and communication of a multi-agent system.
In this project, an algorithm which solves the multi-agent consensus tracking problem for one leader and multiple followers is implemented on a testbed of four quadrotors in an indoor environment. ![]()
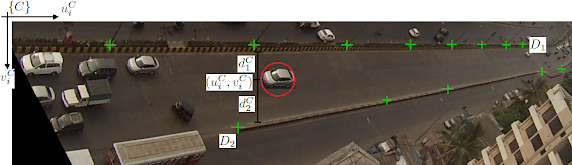
In this project, a new model is introducted for traffic on broad roads, where the drivers do not follow lane discipline.